

V2I 통신이란 ?

Vehicle-to-Infrastructure
차량과 도로 인프라 간의 무선 데이터 교환을 말함
하드웨어, 소프트웨어 및 펌웨어 시스템에 의해 활성화 됨
차량에서 생성된 교통 데이터를 캡쳐 → 운전자에게 안전, 이동성, 환경 관련 조건 정보 무선으로 제공 (무선 양방향 통신)
도로 인프라(차선, 표지판 및 신호등) 구성요소 → 정보 제공 in 차량 (무선)
광범위한 안전, 이동성, 환경적 장점을 제공 가능
V2I 필요 이유
자율주행 차량의 장점을 최대한으로 활용하기 위해서는 인프라가 갖추어져야 함
사고, 교통 체증, 급커브 및 권장 속도에 대한 정보 전달 및 공유 등등
→ 미시간 대학교 교통 연구소 James Sayer
중복성 : 안전성 및 이동성이 향상됨

모든 차량 시스템이 함께 작동하여 노면 표시, 교통 표지판 및 시설물의 가독성을 개선하여 안전을 향상
ex) 터널에서와 같이 GPS가 작동하지 않거나 노면 표시가 차량의 카메라에 보이지 않을 때 작동
ex) 눈이 노면 표시를 덮은 경우 LiDAR 센서 또는 카메라가 교통량을 효율적으로 유지하고
주행 시간과 차량 안전을 개선하는데 필요한 중복적인 정보를 제공
참고논문 : 자율주행 차량의 돌발사고 방지를 위한 V2I 기반의 사고 방지체계 연구

Radar와 LiDAR 센서의 경우 거리 측정 능력에서는 카메라에 비해 월등한 성능을 지님
각각 전파와 레이저(빛) 펄스를 이용하여 대상과의 거리를 측정 = 어두운 환경에서도 확실한 성능
일반 도로 주행의 경우 ADAS(Advanced Drivers Assistant System)를 통해 어느 정도 차량 시스템의 도움을 받아 사고를 피할 수 있음
문제점) 교차로나 골목길 등에서 돌발적으로 등장하는 보행자, 이륜차, 차량 등의 경우 인지 센서의 사각지대에서 등장하는 경우가 많아 사고를 피하기 쉽지 않음
사각지대에서 등장하는 객체와의 사고를 막기 위해 인프라 통신을 이용한 충돌방지체계를 제안함.
Vision 센서와 LiDAR 센서를 융합하여 인지 시스템을 구성 → 객체의 종류와 대상과의 거리 측정
교차로나 골목길 등 → 인프라 시스템이 위치하여 사고 위험을 판단
- YOLOv4 : 2D 이미지에서 사전에 학습된 객체들을 검출하는 알고리즘. 빠른 처리 속도를 자랑
- Vision-LiDAR Fusion : 주행 차량과 객체들 간의 정확한 거리값을 이용하여 충돌 예상시간 계산과 위험경고를 하기 위해 LiDAR 센서와 카메라의 Calibration 진행
카메라는 사용하는 이미지 센서, 렌즈, 초점거리 등 카메라의 구조적 특징을 거쳐 2차원 이미지로 변환되기 때문에 왜곡이 발생함 → 이를 해결하기 위해 Calibration 진행
내부 파라미터 : 초점거리(Focal length), 주점(Principle point), 비대칭계수(Skew coefficient)
외부 파라미터 : 카메라 설치 높이, 자세 등
내부 파라미터와 외부 파라미터를 고려하여 3D 공간 좌표계 상의 점의 좌표를 카메라 좌표로 변환함

카메라 Calibration을 통해 왜곡을 제거한 다음 LiDAR 센서와의 Calibration을 통해 두 센서를 매칭
체스보드의 위치를 변화해가면서 카메라, LiDAR의 기하학적 위치를 고려하여 Rotation Matrix와 Translation Vector를 구함
카메라 2D 이미지에 LiDAR 포인트를 융합하여 각 이미지 픽셀에 해당하는 LiDAR 포인트 거리값을 반환할 수 있음
YOLOv4 알고리즘을 이용하여 검출된 객체들은 센서 퓨전을 통해 객체의 Class와 위치 정보, 거리 등을 얻을 수 있으므로 인프라와 통신을 통해 해당 정보를 대상 차량에 전달함
- Object Tracking : 검출한 객체를 트래킹하기 위해 UKF 기반의 IMM-UKF-JPDA 트래킹 알고리즘 이용함
IMM-UKF-JPDA : UKF를 Base filter로 사용하는 IMM-JPDA 필터.
다중 모드 세팅을 통하여 각기 다른 필터뱅크를 통해 측정값과 예측값을 계산함으로써 객체를 *트래킹 함
IMM 필터 : 모드별 전환확률을 가중치를 고려하여 최적 모델을 선택
트래킹 : 별이나 인공위성, 비행체(탄도탄,미사일,비행기,우주선)등을 추적 감시관찰하는 것

인프라와 차량 간 통신은 2.4GHz 대역의 802.11. b.g.n 세팅의 AP 중계를 이용한 ROS 통신을 이용
ROS : Robot Operating System. OS 위에서 미들웨어와 같이 동작하는 메타 운영체제
master를 통해 node와 node가 서로 통신을 통해 토픽을 주고받으며 통신함
각각의 노드들은 서로 유기적으로 Message로 연결되어 사용된다
통신은 TCP/IP기반이지만 ROS 마스터를 통해 통신하기 때문에 다중의 노드가 서로 통신할 수 있다는 장점이 있음
= V2I 시스템에 접목하였을 때 다중 차량과 인프라 간의 통신이 가능
ROS 통신 시스템 구성)
Publish : 노드에서 마스터로 토픽을 보내는 단계
Subscribe : 노드가 토픽을 마스터로부터 전달받는 단계
-> 인프라 PC에서 실행되는 object detection 패키지에서 인프라 주변 상황을 인지하여 충돌 위험이 있는 객체들의 종류와 해당 물체와의 거리, 충돌까지 예상되는 시간 등의 정보를 publish 하게되면, 사고위험이 있는 객체는 위험 메시지 토픽을 subscribe 하여 정지하거나 감속하는 등 사고위험을 예측하여 판단할 수 있게 됨
ROS 통신 사용 이유 : 강력한 시각화 툴, 각종 소프트웨어 라이브러리 지원, 다중 통신 가능, 자체지원 패키지를 통해 별도의 데이터 가공 없이 간단하게 데이터를 전송할 수 있기 때문

( 결론 )
자율주행차의 센서로는 미처 발견하지 못한 객체를 인프라를 통해 사전에 감지하고 위험 경보를 전달받음으로써
차량의 진행속도 대비 제동거리를 계산하였을 때, 물체와의 충돌을 피할 수 있는 최소한의 거리를 확보 가능
정지 혹은 감속 등의 조작을 통해 충돌사고 위험으로부터 사전에 대처함으로써 사고를 예방 가능
카메라와 LiDAR 센서를 융합하여 야간에서도 주행 차량으로부터 객체까지의 거리 데이터 안내를 통해
사고 예방 기능이 충분히 가능했음을 실험을 통해 확인 가능
자율주행차가 아닌 일반 차량에서도 본 실험을 통해 차량 내에 비교적 간단한 신호 수신 장비를 장착하여
인프라로부터 필요 정보를 수신하여 운전자가 직접 돌발 상황에 대처 가능
참고논문 : V2I 오작동에 의한 자율주행자동차의 위험성 분석
V2I의 주 기능 : 교차로 부근 및 교차로에서의 주변 차량에 대한 정보와 진입차량 정보 제공, 도로 장애물 정보제공 등
V2I의 오작동으로 인해 정보 제공이 잘못된다면 사고로 이어질 수 있으며 위험성이 높음
도출된 오작동에 의한 시뮬레이션 시나리오 중에서 잘못된 신호정보 제공으로 인한 교차로 내의 충돌 상황은 충돌방지 지원시스템인 AEB(Automatic Emergency Braking) 시스템에 의해 사고를 회피할 수 있음


MF5 상세 내용 :
Case 1 : 교차로 부근에서 시속 60km로 주행 중 전방 교차로의 신호는 정지 신호지만 출발 신호로 잘못 제공되어 신호위반으로 교차로에 진입해 다른 교차로 이용자와 충돌하는 사고가 발생.
Case 2 : 교차로 부근에서 시속 60km로 주행 중 전방 교차로 신호가 출발 신호인데 정지 신호로 잘못 제공되어 교차로 진입 전 정차를 위해 감속해 후방 차량이 충돌하는 사고가 발생.
HARA 분석 :기능에 대한 정의와 오작동, 차량 수준의 위험원을 도출하고 Situation Analysis를 통해
어떤 주행환경에서 위험원이 도출되는지 분석, 최종적으로 자동차 안전 무결성 수준인
ASIL(심각도, 노출, 제어 가능성)을 결정함
MF3, MF4, MF5, MF6 시나리오
MF3 시나리오 :

시내 비신호/비보호 교차로에서 좌회전하는 차량과 반대편 차로에서 직진하는 차량과의 충돌상황을 모사하는 시나리오
충돌 오프셋 : 직진 차량의 50%, 주행 속도: 좌회전 차량-저속 30km/h, 직진 차량-60km/h로 설정
MF4, MF5 시나리오 :
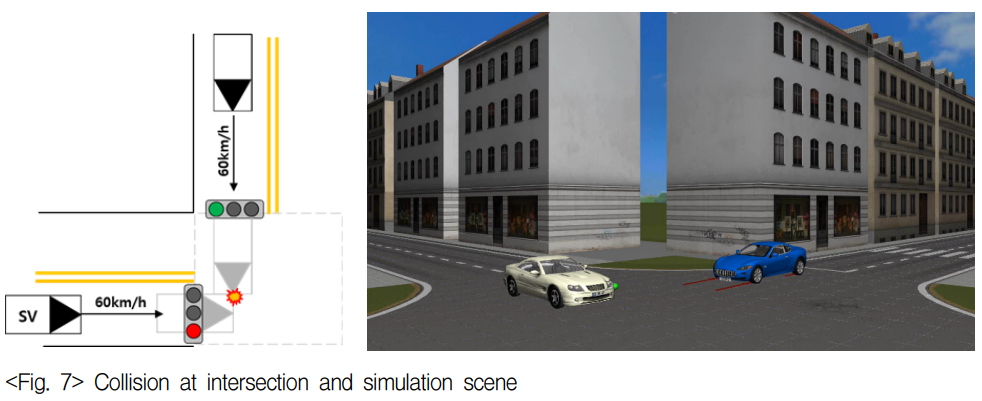
신호 교차로에서 신호정보 미제공에 따른 다른 교차로 진입 차량과의 사고를 모사하는 시나리오
두 차량 모두 60km/h의 속도로 교차로에 진입, 충돌 오프셋 : 50%
MF5 시나리오는 잘못된 신호정보로 인한 교차로 진입차량의 충돌로 신호정보 미제공에 따른 교차로 진입 차량과의 충돌 상황인 MF4와 같은 위협도를 가진다(시뮬레이션 결과는 MF4와 동일)
MF6 시나리오 :
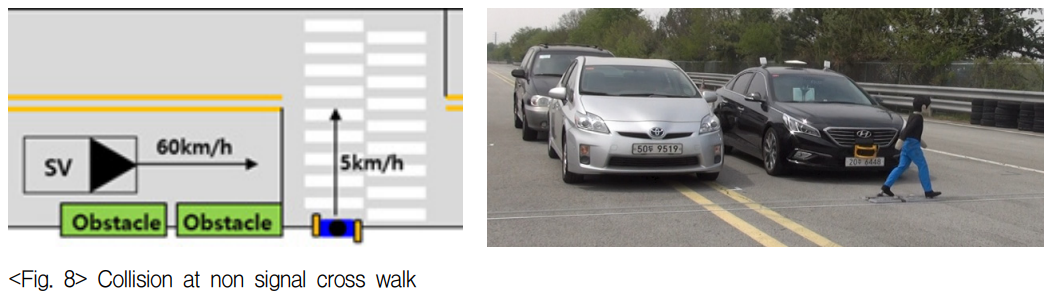
비신호 횡단보도에서의 횡단 이동체 정보의 부재로 인한 충돌 상황을 모사하는 시나리오
센서가 인지하지 못하는 영역에서 횡단하는 보행자를 나타냄
보행자 속도 : 5km/h, 충돌 오프셋 : 차량 범퍼의 중심인 50%
AEB와 같은 안전 시스템에도 불구하고 사고를 회피하지 못하는 교차로 내의 MF3, MF6 상황에 대해서는
V2I 정보가 제대로 들어왔다면 미연에 제동을 통해 사고를 회피할 수 있었을 것.
따라서 V2I 모듈뿐만 아니라 차량에서도 V2I 오작동에 대비한 안전 대책이 확보되어야 함
더욱 많은 상황에 대한 시나리오 도출과 이에 따른 시뮬레이션이 추가로 필요
참고 링크
V2I(Vehicle-to-Infrastructure) 통신이란 무엇이며 왜 필요할까요?
V2I 기술이 안전에 도움을 주고 이동성을 향상시키며, 미래의 도로를 가능하게 하는 방법을 확인해보세요.
www.3m.co.kr
원문보기 - ScienceON
scienceon.kisti.re.kr
원문보기 - ScienceON
scienceon.kisti.re.kr
'INTERLUDE ✦ > 2023 AutoMobility STUDY' 카테고리의 다른 글
| V2V (0) | 2023.05.07 |
|---|---|
| LIN, V2X (0) | 2023.04.07 |
| CAN 통신 (0) | 2023.03.31 |
| 자율주행 스터디 1주차 - 자동차 동향(2) (0) | 2023.03.28 |
| 자율주행 스터디 1주차 - 자동차 동향(1) (0) | 2023.03.28 |